
|
|
|
HoverVehicleData Class Reference
[Vehicles]
Defines the properties of a HoverVehicle. More...
Public Attributes | |
| float | brakingActivationSpeed |
| Maximum speed below which a braking force is applied. | |
| float | brakingForce |
| Force generated by braking. | |
| float | dragForce |
| Drag force factor that acts opposite to the vehicle velocity. | |
| ParticleEmitterData | dustTrailEmitter |
| Emitter to generate particles for the vehicle's dust trail. | |
| float | dustTrailFreqMod |
| Number of dust trail particles to generate based on vehicle speed. | |
| Point3F | dustTrailOffset |
| "X Y Z" offset from the vehicle's origin from which to generate dust trail particles. | |
| SFXProfile | engineSound |
| Looping engine sound. | |
| float | floatingGravMag |
| Scale factor applied to the vehicle gravitational force when the vehicle is floating. | |
| float | floatingThrustFactor |
| Scalar applied to the vehicle's thrust force when the vehicle is floating. | |
| SFXProfile | floatSound |
| Looping sound played while the vehicle is floating. | |
| ParticleEmitterData | forwardJetEmitter |
| Emitter to generate particles for forward jet thrust. | |
| float | gyroDrag |
| Damping torque that acts against the vehicle's current angular momentum. | |
| SFXProfile | jetSound |
| Looping sound played when the vehicle is jetting. | |
| float | mainThrustForce |
| Force generated by thrusting the vehicle forward. | |
| float | normalForce |
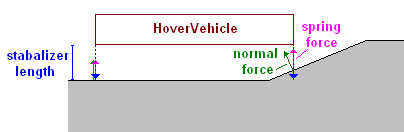
| Force generated in the ground normal direction when the vehicle is not floating (within stabalizer length from the ground). | |
| float | pitchForce |
| Pitch (rotation about the X-axis) force applied when steering in the y-axis direction. | |
| float | restorativeForce |
| Force generated to stabalize the vehicle (return it to neutral pitch/roll) when the vehicle is floating (more than stabalizer length from the ground. | |
| float | reverseThrustForce |
| Force generated by thrusting the vehicle backward. | |
| float | rollForce |
| Roll (rotation about the Y-axis) force applied when steering in the x-axis direction. | |
| float | stabDampingConstant |
| Damping spring force acting against changes in the stabalizer length. | |
| float | stabLenMax |
| Length of the base stabalizer when travelling at maximum speed (maxThrustSpeed). | |
| float | stabLenMin |
| Length of the base stabalizer when travelling at minimum speed (0). | |
| float | stabSpringConstant |
| Value used to generate stabalizer spring force. The force generated depends on stabilizer compression, that is how close the vehicle is to the ground proportional to current stabalizer length. | |
| float | steeringForce |
| Yaw (rotation about the Z-axis) force applied when steering in the x-axis direction.about the vehicle's Z-axis). | |
| float | strafeThrustForce |
| Force generated by thrusting the vehicle to one side. | |
| float | triggerTrailHeight |
| Maximum height above surface to emit dust trail particles. | |
| float | turboFactor |
| Scale factor applied to the vehicle's thrust force when jetting. | |
| float | vertFactor |
| Scalar applied to the vertical portion of the velocity drag acting on the vehicle. | |
Detailed Description
Defines the properties of a HoverVehicle.
Member Data Documentation
Maximum speed below which a braking force is applied.
- See also:
- brakingForce
Force generated by braking.
The vehicle is considered to be braking if it is moving, but the throttle is off, and no left or right thrust is being applied. This force is only applied when the vehicle's velocity is less than brakingActivationSpeed.
Drag force factor that acts opposite to the vehicle velocity.
Also used to determnine the vehicle's maxThrustSpeed.
- See also:
- mainThrustForce
Emitter to generate particles for the vehicle's dust trail.
The trail of dust particles is generated only while the vehicle is moving.
Number of dust trail particles to generate based on vehicle speed.
The vehicle's speed is divided by this value to determine how many particles to generate each frame. Lower values give a more dense trail, higher values a more sparse trail.
"X Y Z" offset from the vehicle's origin from which to generate dust trail particles.
By default particles are emitted directly beneath the origin of the vehicle model.
Looping engine sound.
The volume is dynamically adjusted based on the current thrust level.
Scale factor applied to the vehicle gravitational force when the vehicle is floating.
- See also:
- stabLenMin
Scalar applied to the vehicle's thrust force when the vehicle is floating.
- Note:
- The floatingThrustFactor must be between 0.0 and 1.0 (inclusive).
Looping sound played while the vehicle is floating.
- See also:
- stabMinLen
Emitter to generate particles for forward jet thrust.
Forward jet thrust particles are emitted from model nodes JetNozzle0 and JetNozzle1.
Damping torque that acts against the vehicle's current angular momentum.
Looping sound played when the vehicle is jetting.
Force generated by thrusting the vehicle forward.
Also used to determine the maxThrustSpeed:
- Example:
maxThrustSpeed = (mainThrustForce + strafeThrustForce) / dragForce;
Force generated in the ground normal direction when the vehicle is not floating (within stabalizer length from the ground).
- See also:
- stabLenMin
Pitch (rotation about the X-axis) force applied when steering in the y-axis direction.
Force generated to stabalize the vehicle (return it to neutral pitch/roll) when the vehicle is floating (more than stabalizer length from the ground.
- See also:
- stabLenMin
Force generated by thrusting the vehicle backward.
Roll (rotation about the Y-axis) force applied when steering in the x-axis direction.
Damping spring force acting against changes in the stabalizer length.
- See also:
- stabLenMin
Length of the base stabalizer when travelling at maximum speed (maxThrustSpeed).
- See also:
- stabLenMin
- mainThrustForce
Length of the base stabalizer when travelling at minimum speed (0).
Each tick, the vehicle performs 2 raycasts (from the center back and center front of the vehicle) to check for contact with the ground. The base stabalizer length determines the length of that raycast; if neither raycast hit the ground, the vehicle is floating, stabalizer spring and ground normal forces are not applied.
- See also:
- stabSpringConstant
Value used to generate stabalizer spring force. The force generated depends on stabilizer compression, that is how close the vehicle is to the ground proportional to current stabalizer length.
- See also:
- stabLenMin
Yaw (rotation about the Z-axis) force applied when steering in the x-axis direction.about the vehicle's Z-axis).
Force generated by thrusting the vehicle to one side.
Also used to determine the vehicle's maxThrustSpeed.
- See also:
- mainThrustForce
Maximum height above surface to emit dust trail particles.
If the vehicle is less than triggerTrailHeight above a static surface with a material that has 'showDust' set to true, the vehicle will emit particles from the dustTrailEmitter.
Scale factor applied to the vehicle's thrust force when jetting.
Scalar applied to the vertical portion of the velocity drag acting on the vehicle.
For the horizontal (X and Y) components of velocity drag, a factor of 0.25 is applied when the vehicle is floating, and a factor of 1.0 is applied when the vehicle is not floating. This velocity drag is multiplied by the vehicle's dragForce, as defined above, and the result is subtracted from it's movement force.
- Note:
- The vertFactor must be between 0.0 and 1.0 (inclusive).