Es soll nun eine einfache Lageregelung realisiert werden. Ändern Sie den Schaltkreis dazu wie in der folgenden Abbildung. Denken Sie daran, dass Sie die Schalldämpfer an den Ventilanschlüssen entfernen müssen, bevor Sie Leitungen ziehen können. Statt des Funktionsgenerators liefert nun das Wegmesssystem die Eingangsspannung für den Proportional-Ventilmagneten. Um die Marke am Zylinder eingeben zu können, Stellen Sie im Register „Konfiguration“ des Eigenschaften-Dialogs die Option „Abfrage“ ein.
|
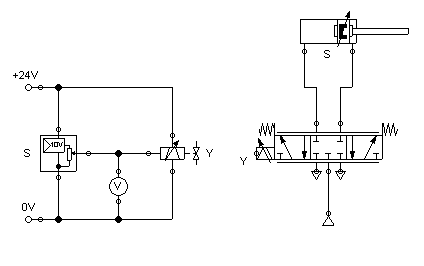
| Einfache Lageregelung
|

| Beachten Sie, dass das Regelventil in diesem Beispiel horizontal gespiegelt ist.
|

| Starten Sie die Simulation und beobachten Sie, dass der Zylinder stehen bleibt, wenn er die Hälfte der Strecke zurückgelegt hat.
| Jetzt wollen wir die Schaltung derart erweitern, dass der Zylinder jede beliebige Position, die wir während der Simulation durch einen Regler einstellen, möglichst schnell und trotzdem exakt anfahren kann. Dazu setzen wir einen PID-Regler ein.
|
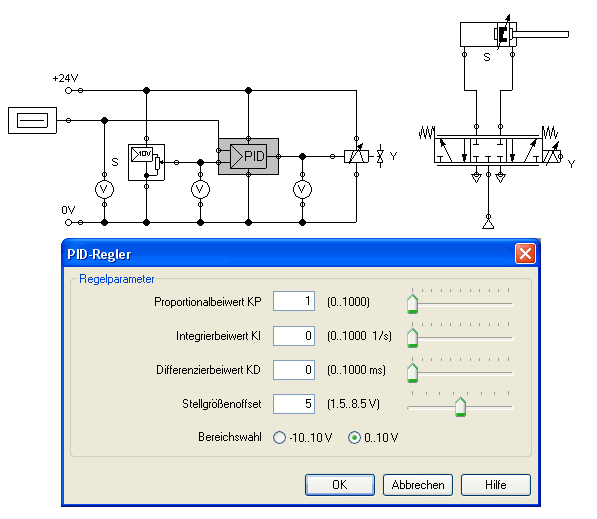
| Bauen Sie den folgenden Schaltkreis auf und stellen Sie die Parameterwerte des PID-Reglers wie abgebildet ein.
|
|
| Beachten Sie, dass das Regelventil gegenüber dem obigen Beispiel gespiegelt ist.
|
|
| Lageregelung mit PID-Regler
|
|
| Starten Sie die Simulation und verstellen Sie den y-Versatz des Funktionsgenerators langsam zwischen 0 und 10.
| Der Zylinder bewegt sich solange, bis er seine Sollposition erreicht hat und bleibt dann stehen. Die Zielposition des Zylinders ist proportional zur eingestellten Spannung am Funktionsgenerator: 0 V entspricht dabei „ganz eingefahren“, 10 V bedeutet „komplett ausgefahren“. Der Wert 5 ist demnach die Mittelstellung des Zylinderkolbens. Dabei ist es unerheblich, von welcher Position der Zylinder losfährt, er bleibt schließlich immer an der vorgegebenen Zielposition stehen.
|
| Variieren Sie die initiale Kolbenstellung und beobachten Sie, wie zielsicher der Zylinder jedesmal seine Sollposition erreicht.
| Zur genaueren Untersuchung des Regelungsvorgangs betrachten wir den Weg und die Geschwindigkeit des Zylinders bis zur Sollposition. Dazu fügen wir ein Zustandsdiagramm ein, bringen es auf eine passende Größe und ziehen den Zylinder auf das Diagramm. Es öffnet sich ein Dialog, in dem wir die beiden Zustandsgrößen „Weg“ und „Geschwindigkeit“ auswählen.
|
| Pneumatik ist schnell. Um die nachfolgend beschriebenen Effekte besser beobachten zu können, stellen Sie den Hub des Zylinders auf 5000 mm.
|
|
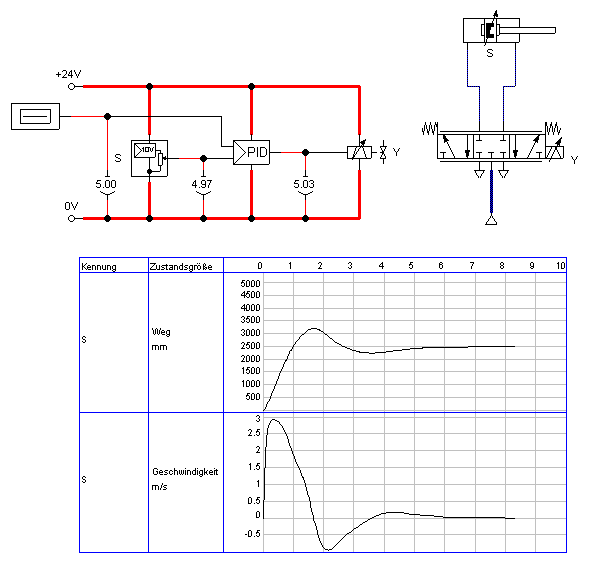
| Stellen Sie den y-Versatz des Funktionsgenerators auf 5 und die Startposition der Kolbenstange des Zylinders auf 0 und starten Sie die Simulation.
| Der Zylinder fährt bis zur Mitte aus und verliert dabei kontinuierlich an Geschwindigkeit, bis er zum Stillstand kommt.
|
| Weg- und Geschwindigkeitsverlauf des Regelungsvorgangs
| Häufig ist es wünschenswert, dass der Zylinder mit maximaler Geschwindigkeit verfährt, bis er seine Sollposition erreicht hat, um dann möglichst spontan stehen zu bleiben. Dazu können wir das Positionssignal des Wegmesssystems verstärken und somit die Umsteuerung des Regelventils beschleunigen. Wir nutzen dabei aus, dass der PID-Regler die Ausgangsspannung für den Proportional-Ventilmagneten auf 10 V begrenzt.
|
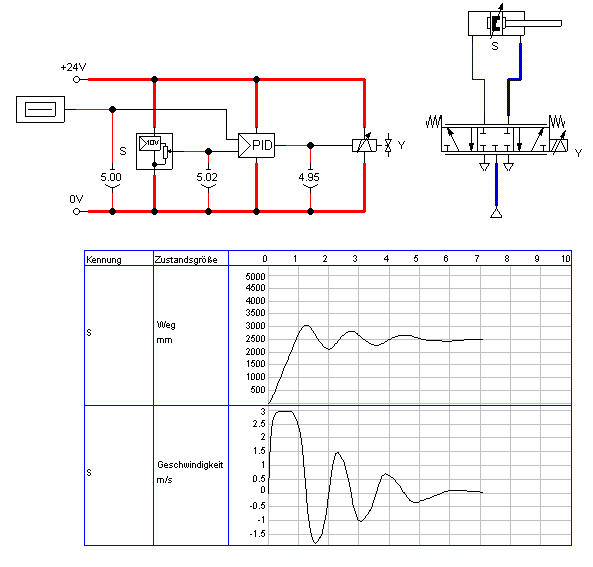
| Stellen Sie den „Proportionalbeiwert“ des PID-Reglers auf den Wert 3 und starten Sie die Simulation.
|
|
| Weg- und Geschwindigkeitsverlauf mit verstärktem Eingangssignal
| Deutlich zu erkennen ist, dass der Zylinder nun über eine weite Strecke mit konstanter Geschwindigkeit ausfährt. Dann wird er sehr stark abgebremst und kommt schließlich zum Stillstand.
|
| Man erkennt jedoch, dass der Zylinderkolben aufgrund seiner Massenträgheit und der Kompressibilität der Luft deutlich über das Ziel hinaus fährt und einige Male hin- und herfährt, bis er schließlich zur Ruhe kommt. Diese Schwingungen um die Sollposition herum sind typisch für eine derartige simple Regelung. In der Praxis wird man versuchen, durch Trimmen der zusätzlichen Parameter des PID- bzw. Zustandsreglers diese Schwingungen zu dämpfen. An dieser Stelle wollen wir es jedoch bei den einfachen Grundlagen belassen und verweisen auf weiterführende Literatur der Proportional- und Regelungstechnik.
|
|