 |
第39课 |
 |
 |
物理模拟简介:
还记得高中的物理吧,直线运动,自由落体运动,弹簧。在这一课里,我们将创造这一切。 |
|
 |
 |
物理模拟介绍
如果你很熟悉物理规律,并且想实现它,这篇文章很适合你。
在这篇教程里,你会创建一个非常简单的物理引擎,我们将创建以下类:
内容:
| 位置类 |
| * class Vector3D |
---> |
|
| 力和运动 |
| * class Mass |
---> |
|
| 模拟类 |
| * class Simulation |
---> |
|
| 模拟匀速运动 |
| * class ConstantVelocity : public Simulation |
---> |
|
| 模拟在力的作用下运动 |
| * class MotionUnderGravitation : public Simulation |
---> |
|
| * class MassConnectedWithSpring : public Simulation |
---> |
|
|
 |
class Mass
{
public:
float m;
Vector3D pos;
Vector3D vel;
Vector3D force;
Mass(float m)
{
this->m = m;
}
...
|
下面的代码给物体增加一个力,在初始时这个力为0
|
|
void applyForce(Vector3D force)
{
this->force += force;
}
void init()
{
force.x = 0;
force.y = 0;
force.z = 0;
}
...
|
下面的步骤完成一个模拟:
1.设置力
2.应用外力
3.根据力的时间,计算物体的位置和速度
|
|
void simulate(float dt)
{
vel += (force / m) * dt;
pos += vel * dt;
}
|
模拟类怎样运作:
在一个物理模拟中,我们按以下规律进行模拟,设置力,更新物体的位置和速度,按时间一次又一次的进行模拟。下面是它的实现代码: |
|
class Simulation
{
public:
int numOfMasses;
Mass** masses;
Simulation(int numOfMasses, float m)
{
this->numOfMasses = numOfMasses;
masses = new Mass*[numOfMasses];
for (int a = 0; a < numOfMasses; ++a)
masses[a] = new Mass(m);
}
virtual void release()
{
for (int a = 0; a < numOfMasses; ++a)
{
delete(masses[a]);
masses[a] = NULL;
}
delete(masses);
masses = NULL;
}
Mass* getMass(int index)
{
if (index < 0 || index >= numOfMasses)
return NULL;
return masses[index];
}
...
(class Simulation continued)
virtual void init()
{
for (int a = 0; a < numOfMasses; ++a)
masses[a]->init();
}
virtual void solve()
{
}
virtual void simulate(float dt)
{
for (int a = 0; a < numOfMasses; ++a)
masses[a]->simulate(dt);
}
...
|
整个模拟的部分被封装到下面的函数中 |
|
(class Simulation continued)
virtual void operate(float dt)
{
init();
solve();
simulate(dt);
}
};
|
现在我们已经有了一个简单的物理模拟引擎了,它包含有物体和模拟两个类,下面我们基于它们创建三个具体的模拟对象:
在程序中控制一个模拟对象:
在我们写一个具体的模拟类之前,让我们看看如何在程序中模拟一个对象,在这个教程里,模拟引擎和操作模拟的程序在两个文件里,在程序中我们使用如下的函数,操作模拟:
|
|
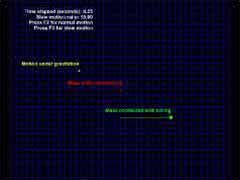
void Update (DWORD milliseconds)
|
这个函数在每一帧的开始更新,参数为相隔的时间。 |
|
void Update (DWORD milliseconds)
{
...
...
...
float dt = milliseconds / 1000.0f;
dt /= slowMotionRatio;
timeElapsed += dt;
...
|
在下面的代码中,我们定义一个处理间隔,没隔这么长时间,让物理引擎模拟一次。 |
|
...
float maxPossible_dt = 0.1f;
int numOfIterations = (int)(dt / maxPossible_dt) + 1;
if (numOfIterations != 0)
dt = dt / numOfIterations;
for (int a = 0; a < numOfIterations; ++a)
{
constantVelocity->operate(dt);
motionUnderGravitation->operate(dt);
massConnectedWithSpring->operate(dt);
}
}
|
下面让我们来写着两个具体的模拟类:
1. 具有恒定速度的物体
* class ConstantVelocity : public Simulation --->
|
|
class ConstantVelocity : public Simulation
{
public:
ConstantVelocity() : Simulation(1, 1.0f)
{
masses[0]->pos = Vector3D(0.0f, 0.0f, 0.0f);
masses[0]->vel = Vector3D(1.0f, 0.0f, 0.0f);
}
};
|
下面我们来创建一个具有恒定加速的物体:
|
|
class MotionUnderGravitation : public Simulation
{
Vector3D gravitation;
MotionUnderGravitation(Vector3D gravitation) : Simulation(1, 1.0f)
{
this->gravitation = gravitation;
masses[0]->pos = Vector3D(-10.0f, 0.0f, 0.0f);
masses[0]->vel = Vector3D(10.0f, 15.0f, 0.0f);
}
...
|
下面的函数设置施加给物体的力 |
|
virtual void solve()
{
for (int a = 0; a < numOfMasses; ++a)
masses[a]->applyForce(gravitation * masses[a]->m);
}
|
下面的类创建一个受到与距离成正比的力的物体: |
|
class MassConnectedWithSpring : public Simulation
{
public:
float springConstant;
Vector3D connectionPos;
MassConnectedWithSpring(float springConstant) : Simulation(1, 1.0f)
{
this->springConstant = springConstant;
connectionPos = Vector3D(0.0f, -5.0f, 0.0f);
masses[0]->pos = connectionPos + Vector3D(10.0f, 0.0f, 0.0f);
masses[0]->vel = Vector3D(0.0f, 0.0f, 0.0f);
}
...
|
下面的函数设置当前物体所受到的力: |
|
virtual void solve()
{
for (int a = 0; a < numOfMasses; ++a)
{
Vector3D springVector = masses[a]->pos - connectionPos;
masses[a]->applyForce(-springVector * springConstant);
}
}
|
好了上面就是一个简单的物理模拟,希望你能喜欢:)
 |
版权与使用声明:
我是个对学习和生活充满激情的普通男孩,在网络上我以DancingWind为昵称,我的联系方式是zhouwei02@mails.tsinghua.edu.cn,如果你有任何问题,都可以联系我。
引子
网络是一个共享的资源,但我在自己的学习生涯中浪费大量的时间去搜索可用的资料,在现实生活中花费了大量的金钱和时间在书店中寻找资料,于是我给自己起了个昵称DancingWind,其意义是想风一样从各个知识的站点中吸取成长的养料。在飘荡了多年之后,我决定把自己收集的资料整理为一个统一的资源库。
版权声明
所有DancingWind发表的内容,大多都来自共享的资源,所以我没有资格把它们据为己有,或声称自己为这些资源作出了一点贡献。故任何人都可以复制,修改,重新发表,甚至以自己的名义发表,我都不会追究,但你在做以上事情的时候必须保证内容的完整性,给后来的人一个完整的教程。最后,任何人不能以这些资料的任何部分,谋取任何形式的报酬。
发展计划
在国外,很多资料都是很多人花费几年的时间慢慢积累起来的。如果任何人有兴趣与别人共享你的知识,我很欢迎你与我联系,但你必须同意我上面的声明。
感谢
感谢我的母亲一直以来对我的支持和在生活上的照顾。
感谢我深爱的女友田芹,一直以来默默的在精神上和生活中对我的支持,她甚至把买衣服的钱都用来给我买书了,她真的是我见过的最好的女孩,希望我能带给她幸福。
源码 RAR格式 |
| <
第38课 |
第40课
> |