
PxImmediateMode.h File Reference
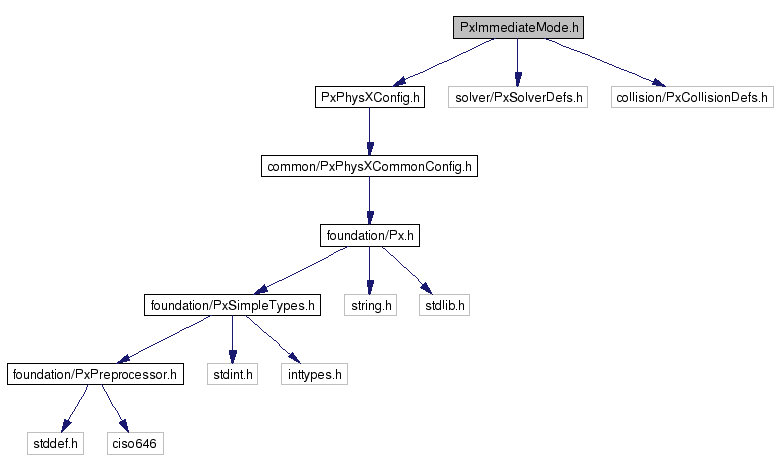
#include "PxPhysXConfig.h"#include "solver/PxSolverDefs.h"#include "collision/PxCollisionDefs.h"
Include dependency graph for PxImmediateMode.h:
Go to the source code of this file.
Classes | |
| struct | PxRigidBodyData |
| Structure to store rigid body properties. More... | |
| class | PxContactRecorder |
| Callback class to record contact points produced by immediate::PxGenerateContacts. More... | |
Functions | |
| PX_C_EXPORT PX_PHYSX_CORE_API void | PxConstructSolverBodies (const PxRigidBodyData *inRigidData, PxSolverBodyData *outSolverBodyData, const PxU32 nbBodies, const PxVec3 &gravity, const PxReal dt) |
| Constructs a PxSolverBodyData structure based on rigid body properties. Applies gravity, damping and clamps maximum velocity. | |
| PX_C_EXPORT PX_PHYSX_CORE_API void | PxConstructStaticSolverBody (const PxTransform &globalPose, PxSolverBodyData &solverBodyData) |
| Constructs a PxSolverBodyData structure for a static body at a given pose. | |
| PX_C_EXPORT PX_PHYSX_CORE_API PxU32 | PxBatchConstraints (PxSolverConstraintDesc *solverConstraintDescs, const PxU32 nbConstraints, PxSolverBody *solverBodies, PxU32 nbBodies, PxConstraintBatchHeader *outBatchHeaders, PxSolverConstraintDesc *outOrderedConstraintDescs) |
| Groups together sets of independent PxSolverConstraintDesc objects to be solved using SIMD SOA approach. | |
| PX_C_EXPORT PX_PHYSX_CORE_API bool | PxCreateContactConstraints (PxConstraintBatchHeader *batchHeader, const PxU32 nbHeaders, PxSolverContactDesc *contactDescs, PxConstraintAllocator &allocator, PxReal invDt, PxReal bounceThreshold, PxReal frictionOffsetThreshold, PxReal correlationDistance) |
| Creates a set of contact constraint blocks. Note that, depending the results of PxBatchConstraints, each batchHeader may refer to up to 4 solverConstraintDescs. This function will allocate both constraint and friction patch data via the PxConstraintAllocator provided. Constraint data is only valid until PxSolveConstraints has completed. Friction data is to be retained and provided by the application for friction correlation. | |
| PX_C_EXPORT PX_PHYSX_CORE_API bool | PxCreateJointConstraints (PxConstraintBatchHeader *batchHeader, const PxU32 nbHeaders, PxSolverConstraintPrepDesc *jointDescs, PxConstraintAllocator &allocator, PxReal dt, PxReal invDt) |
| Creates a set of joint constraint blocks. Note that, depending the results of PxBatchConstraints, the batchHeader may refer to up to 4 solverConstraintDescs. | |
| PX_C_EXPORT PX_PHYSX_CORE_API bool | PxCreateJointConstraintsWithShaders (PxConstraintBatchHeader *batchHeader, const PxU32 nbBatchHeaders, PxConstraint **constraints, PxSolverConstraintPrepDesc *jointDescs, PxConstraintAllocator &allocator, PxReal dt, PxReal invDt) |
| Creates a set of joint constraint blocks. This function runs joint shaders defined inside PxConstraint** param, fills in joint row information in jointDescs and then calls PxCreateJointConstraints. | |
| PX_C_EXPORT PX_PHYSX_CORE_API void | PxSolveConstraints (PxConstraintBatchHeader *batchHeaders, const PxU32 nbBatchHeaders, PxSolverConstraintDesc *solverConstraintDescs, PxSolverBody *solverBodies, PxVec3 *linearMotionVelocity, PxVec3 *angularMotionVelocity, const PxU32 nbSolverBodies, const PxU32 nbPositionIterations, const PxU32 nbVelocityIterations) |
| Iteratively solves the set of constraints defined by the provided PxConstraintBatchHeader and PxSolverConstraintDesc structures. Updates deltaVelocities inside the PxSolverBody structures. Produces resulting linear and angular motion velocities. | |
| PX_C_EXPORT PX_PHYSX_CORE_API void | PxIntegrateSolverBodies (PxSolverBodyData *solverBodyData, PxSolverBody *solverBody, const PxVec3 *linearMotionVelocity, const PxVec3 *angularMotionState, const PxU32 nbBodiesToIntegrate, PxReal dt) |
| Integrates a rigid body, returning the new velocities and transforms. After this function has been called, solverBodyData stores all the body's velocity data. | |
| PX_C_EXPORT PX_PHYSX_CORE_API bool | PxGenerateContacts (const PxGeometry *const *geom0, const PxGeometry *const *geom1, const PxTransform *pose0, const PxTransform *pose1, PxCache *contactCache, const PxU32 nbPairs, PxContactRecorder &contactRecorder, const PxReal contactDistance, const PxReal meshContactMargin, const PxReal toleranceLength, PxCacheAllocator &allocator) |
Copyright © 2008-2017 NVIDIA Corporation, 2701 San Tomas Expressway, Santa Clara, CA 95050 U.S.A. All rights reserved. www.nvidia.com