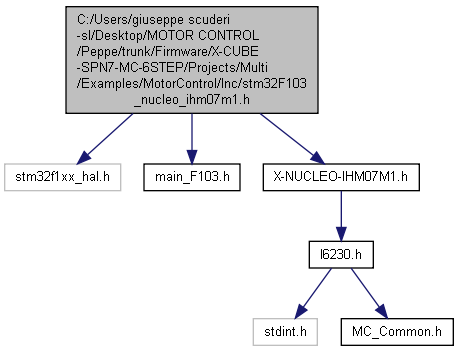
X-CUBE-SPN7 for X-NUCLEO-IHM07M1: C:/Users/giuseppe scuderi-sl/Desktop/MOTOR CONTROL/Peppe/trunk/Firmware/X-CUBE-SPN7-MC-6STEP/Projects/Multi/Examples/MotorControl/Inc/stm32F103_nucleo_ihm07m1.h File Reference
From X-NUCLEO-IHM07M1 X-CUBE-SPN7
|
X-CUBE-SPN7 for X-NUCLEO-IHM07M1
|
This file provides the interface between the MC-lib and STM Nucleo. More...
Go to the source code of this file.
Macros | |
| #define | HF_TIMx htim1 |
| #define | LF_TIMx htim4 |
| #define | HALL_ENCODER_TIMx htim2 |
| #define | ADCx hadc1 |
| #define | REFx htim3 |
| #define | UART huart2 |
| #define | GPIO_PORT_1 GPIOC |
| #define | GPIO_CH1 GPIO_PIN_10 |
| #define | GPIO_PORT_2 GPIOC |
| #define | GPIO_CH2 GPIO_PIN_11 |
| #define | GPIO_PORT_3 GPIOC |
| #define | GPIO_CH3 GPIO_PIN_12 |
| #define | GPIO_SET GPIO_PIN_SET |
| #define | GPIO_RESET GPIO_PIN_RESET |
| #define | ADC_CH_1 ADC_CHANNEL_11 /*CURRENT*/ |
| #define | ADC_CH_2 ADC_CHANNEL_9 /*SPEED*/ |
| #define | ADC_CH_3 ADC_CHANNEL_1 /*VBUS*/ |
| #define | ADC_CH_4 ADC_CHANNEL_12 /*TEMP*/ |
| #define | ADC_Bemf_CH1 ADC_CHANNEL_13 /*BEMF1*/ |
| #define | ADC_Bemf_CH2 ADC_CHANNEL_8 /*BEMF2*/ |
| #define | ADC_Bemf_CH3 ADC_CHANNEL_7 /*BEMF3*/ |
| #define | ADC_CH_1_ST ADC_SAMPLETIME_1CYCLE_5 /*CURRENT sampling time */ |
| #define | ADC_CH_2_ST ADC_SAMPLETIME_28CYCLES_5 /*SPEED sampling time*/ |
| #define | ADC_CH_3_ST ADC_SAMPLETIME_28CYCLES_5 /*VBUS sampling time*/ |
| #define | ADC_CH_4_ST ADC_SAMPLETIME_28CYCLES_5 /*TEMP sampling time*/ |
| #define | ADC_Bemf_CH1_ST ADC_SAMPLETIME_28CYCLES_5 /*BEMF1 sampling time*/ |
| #define | ADC_Bemf_CH2_ST ADC_SAMPLETIME_28CYCLES_5 /*BEMF2 sampling time*/ |
| #define | ADC_Bemf_CH3_ST ADC_SAMPLETIME_28CYCLES_5 /*BEMF3 sampling time*/ |
| #define | HF_TIMx_CH1 TIM_CHANNEL_1 |
| #define | HF_TIMx_CH2 TIM_CHANNEL_2 |
| #define | HF_TIMx_CH3 TIM_CHANNEL_3 |
| #define | HF_TIMx_CCR1 CCR1 /*Channel 1*/ |
| #define | HF_TIMx_CCR2 CCR2 /*Channel 2*/ |
| #define | HF_TIMx_CCR3 CCR3 /*Channel 3*/ |
| #define | DAC_ENABLE 0 |
| #define | DACx htim3 |
| #define | DAC_CH TIM_CHANNEL_2 |
| #define | CCRx CCR2 |
| #define | GPIO_PORT_ZCR GPIOC |
| #define | GPIO_CH_ZCR GPIO_PIN_7 |
| #define | GPIO_PORT_COMM GPIOC |
| #define | GPIO_CH_COMM GPIO_PIN_4 |
| #define | STARTM_CMD 0 |
| #define | STOPMT_CMD 1 |
| #define | SETSPD_CMD 2 |
| #define | GETSPD_CMD 3 |
| #define | INIREF_CMD 4 |
| #define | POLESP_CMD 5 |
| #define | ACCELE_CMD 6 |
| #define | DMGCTR_CMD 7 |
| #define | MAXDMG_CMD 8 |
| #define | MINDMG_CMD 9 |
| #define | KP_PRM_CMD 10 |
| #define | KI_PRM_CMD 11 |
| #define | POTENZ_CMD 12 |
| #define | HELP_CMD 13 |
| #define | STATUS_CMD 14 |
| #define | DIRECT_CMD 15 |
Functions | |
| void | MC_SixStep_ADC_Channel (uint32_t) |
| API function for STM32 instruction. | |
| void | MC_SixStep_Nucleo_Init (void) |
| void | START_Ref_Generation (void) |
| void | STOP_Ref_Generation (void) |
| void | Set_Ref_Generation (uint16_t) |
| void | START_DAC (void) |
| void | STOP_DAC (void) |
| void | SET_DAC_value (uint16_t) |
| void | Bemf_delay_calc (void) |
| uint32_t | Get_UART_Data (void) |
| void | MC_SixStep_EnableInput_CH1_E_CH2_E_CH3_D (void) |
| void | MC_SixStep_EnableInput_CH1_E_CH2_D_CH3_E (void) |
| void | MC_SixStep_EnableInput_CH1_D_CH2_E_CH3_E (void) |
| void | MC_SixStep_DisableInput_CH1_D_CH2_D_CH3_D (void) |
| void | MC_SixStep_Start_PWM_driving (void) |
| void | MC_SixStep_Stop_PWM_driving (void) |
| void | MC_SixStep_HF_TIMx_SetDutyCycle_CH1 (uint16_t) |
| void | MC_SixStep_HF_TIMx_SetDutyCycle_CH2 (uint16_t) |
| void | MC_SixStep_HF_TIMx_SetDutyCycle_CH3 (uint16_t) |
| void | MC_SixStep_Current_Reference_Start (void) |
| void | MC_SixStep_Current_Reference_Stop (void) |
| void | MC_SixStep_Current_Reference_Setvalue (uint16_t) |
Detailed Description
This file provides the interface between the MC-lib and STM Nucleo.
- Author
- System lab - Automation and Motion control team
- Version
- V1.0.0
- Date
- 06-July-2015
- Attention
© COPYRIGHT(c) 2015 STMicroelectronics
Redistribution and use in source and binary forms, with or without modification, are permitted provided that the following conditions are met:
- Redistributions of source code must retain the above copyright notice, this list of conditions and the following disclaimer.
- Redistributions in binary form must reproduce the above copyright notice, this list of conditions and the following disclaimer in the documentation and/or other materials provided with the distribution.
- Neither the name of STMicroelectronics nor the names of its contributors may be used to endorse or promote products derived from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
Macro Definition Documentation
| #define ACCELE_CMD 6 |
Set the Accelleration for Start-up of the motor command received
| #define CCRx CCR2 |
TIM channel number for DAC output (CCRx)
| #define DAC_CH TIM_CHANNEL_2 |
TIM channel for DAC output
| #define DAC_ENABLE 0 |
Enable (1) the DAC peripheral
| #define DACx htim3 |
TIM peripheral for DAC output
| #define DIRECT_CMD 15 |
Get the motor direction
| #define DMGCTR_CMD 7 |
Enable the DEMAG dynamic control command received
| #define GETSPD_CMD 3 |
Get Mechanical Motor Speed command received
| #define GPIO_CH_COMM GPIO_PIN_4 |
GPIO pin name for 6Step commutation
| #define GPIO_CH_ZCR GPIO_PIN_7 |
GPIO pin name for zero crossing detection
| #define GPIO_PORT_COMM GPIOC |
GPIO port name for 6Step commutation
| #define GPIO_PORT_ZCR GPIOC |
GPIO port name for zero crossing detection
| #define HELP_CMD 13 |
Help command received
| #define INIREF_CMD 4 |
Set the new STARUP_CURRENT_REFERENCE value command received
| #define KI_PRM_CMD 11 |
Set the KI PI param command received
| #define KP_PRM_CMD 10 |
Set the KP PI param command received
| #define MAXDMG_CMD 8 |
Set the BEMF Demagn MAX command received
| #define MINDMG_CMD 9 |
Set the BEMF Demagn MIN command received
| #define POLESP_CMD 5 |
Set the Pole Pairs value command received
| #define POTENZ_CMD 12 |
Enable Potentiometer command received
| #define SETSPD_CMD 2 |
Set the new speed value command received
| #define STARTM_CMD 0 |
Start Motor command received
| #define STATUS_CMD 14 |
Get the Status of the system command received
| #define STOPMT_CMD 1 |
Stop Motor command received
Generated on Fri Sep 11 2015 16:47:21 for X-CUBE-SPN7 for X-NUCLEO-IHM07M1 by