RLL Computer Vision Code: HCVC::MainControl类 参考
From RLL Computer Vision
|
RLL Computer Vision Code
1.0
江苏科技大学HLL战队机器视觉代码
|
HCVC::MainControl类 参考
系统总体逻辑控制 更多...
#include <main_control.h>
类 HCVC::MainControl 继承关系图:
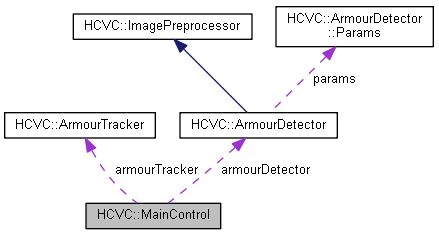
HCVC::MainControl 的协作图:
Public 成员函数 | |
| MainControl () | |
| 初始化 更多... | |
| bool | readSrcFile (const string &path) |
| 设置源文件读取路径 更多... | |
| void | run (const string &path) |
| 运行整体系统并显示运行结果 更多... | |
Protected 属性 | |
| ArmourDetector | armourDetector |
| 图像检测器,处理并分析图像找出装甲的初始位置 更多... | |
| ArmourTracker | armourTracker |
| 运动追踪器,对经过图像检测后找到的灯柱区域跟踪 更多... | |
Private 类型 | |
| enum | { DETECTING, TRACKING } |
| 装甲板检测状态常量 更多... | |
Private 属性 | |
| int | status |
| 当前装甲板检测程序的状态 更多... | |
| string | srcFilePath |
| 读取文件路径 更多... | |
| VideoCapture | srcFile |
| 存储读取的文件数据 更多... | |
详细描述
成员枚举类型说明
◆ anonymous enum
|
private |
构造及析构函数说明
◆ MainControl()
| HCVC::MainControl::MainControl | ( | ) |
初始化
在文件 main_control.cpp 第 5 行定义.
成员函数说明
◆ readSrcFile()
| bool HCVC::MainControl::readSrcFile | ( | const string & | path | ) |
设置源文件读取路径
从指定路径读取视频文件
- 参数
-
[in] path 读取源文件的路径
- 返回
- 文件是否读取成功。 返回true,表示文件读取成功; 返回false,表示文件读取失败
在文件 main_control.cpp 第 10 行定义.
◆ run()
| void HCVC::MainControl::run | ( | const string & | path | ) |
类成员变量说明
◆ armourDetector
|
protected |
图像检测器,处理并分析图像找出装甲的初始位置
在文件 main_control.h 第 82 行定义.
◆ armourTracker
|
protected |
运动追踪器,对经过图像检测后找到的灯柱区域跟踪
在文件 main_control.h 第 85 行定义.
◆ srcFile
|
private |
存储读取的文件数据
在文件 main_control.h 第 102 行定义.
◆ srcFilePath
|
private |
读取文件路径
在文件 main_control.h 第 99 行定义.
◆ status
|
private |
当前装甲板检测程序的状态
在文件 main_control.h 第 96 行定义.
该类的文档由以下文件生成:
- code/main_control.h
- code/main_control.cpp
制作者