Authoring Interfaces
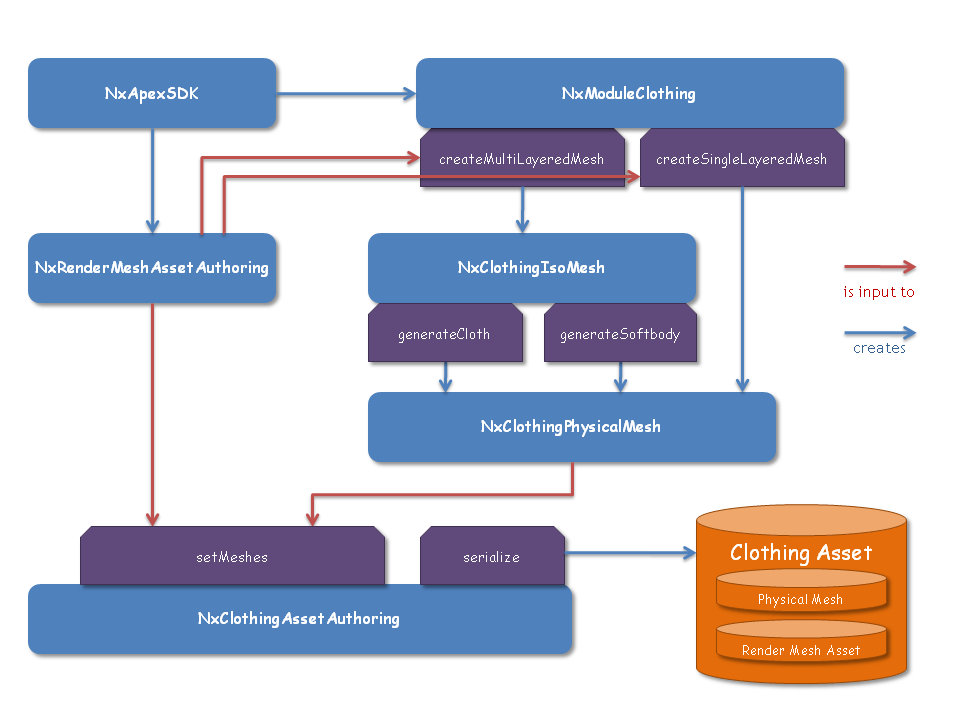
Different tools are provided to create and author clothing assets that can be loaded at run time. There are plug-ins to the DCC tools Autodesk Maya and 3DS Max and also the standalone ClothingTool that shows how to implement the authoring interface of the Clothing Module. The diagram below shows the work-flow to create a clothing asset. See the clothing module documentation for a more detailed description. This chapter explains the work-flow to create a Clothing Asset taking the ClothingTool as an example.
Initialization
Like for the run time part first an PxPhysics object, a reference to the cooking library, and the APEX objects ApexSDK and ModuleClothing have to be created as a starting point:
#include <NvParamUtils.h>
// init PhysX
PxPhysics* m_physxSDK;
PxFoundation* m_foundation;
m_foundation = PxCreateFoundation(PX_PHYSICS_VERSION, ...);
m_physxSDK = PxCreatePhysics( ... );
PxInitExtensions(*m_physxSDK);
// init cooking
PxCookingParams params;
PxCooking* m_cooking;
m_cooking = PxCreateCooking(PX_PHYSICS_VERSION, m_physicsSDK->getFoundation(), params);
// init apex sdk
nvidia::apex::ApexSDKDesc apexSdkDesc;
// Let Apex know about our PhysX SDK and cooking library
apexSdkDesc.physXSDK = m_physxSDK;
apexSdkDesc.cooking = m_cooking;
// The output stream is used to report any errors back to the user
apexSdkDesc.outputStream = mErrorReport;
// Our custom render resource manager
apexSdkDesc.renderResourceManager = mRenderResourceManager;
// Our custom named resource handler (NRP)
apexSdkDesc.resourceCallback = mResourceCallback;
// Apex needs an allocator and error stream.
// By default it uses those of the PhysX SDK.
apexSdkDesc.allocator = mApexAllocator;
// Finally, create the Apex SDK
ApexCreateError errorCode;
mApexSDK = nvidia::apex::CreateApexSDK(apexSdkDesc, &errorCode);
// init clothing module
mApexClothingModule = static_cast<nvidia::apex::ModuleClothing*>(mApexSDK->createModule("Clothing"));
if (mApexClothingModule != NULL)
{
NvParameterized::Interface* moduleDesc = mApexClothingModule->getDefaultModuleDesc();
// This optimization is only needed for run time, we turn it off for authoring
NvParameterized::setParamU32(*moduleDesc, "maxUnusedPhysXResources", 0);
mApexClothingModule->init(moduleDesc);
}
// init conversion module
// this module is only needed to convert older parameterized assets to the latest one
mApexClothingLegacyModule = static_cast<nvidia::apex::ModuleClothing*>(mApexSDK->createModule("Clothing_Legacy"));
Graphical Mesh
APEX uses the RenderMeshAsset as a container for graphics meshes. To provide the graphics mesh of the part of the character that is going to be simulated, an RenderMeshAssetAuthoring class has to be created. For that a descriptor has to be filled:
nvidia::apex::RenderMeshAssetAuthoring::MeshDesc meshDesc;
// a mesh desc must contain one or more submeshes
nvidia::apex::RenderMeshAssetAuthoring::SubmeshDesc submeshDesc;
meshDesc.m_numSubmeshes = 1;
meshDesc.m_submeshes = &submeshDesc;
The mesh has one submesh for each different material name it uses:
// fill out the submeshDesc
submeshDesc.m_numVertices = mVertices.size();
// each submeshDesc must contain one or more vertex buffers
nvidia::apex::RenderMeshAssetAuthoring::VertexBuffer vertexBufferDesc;
submeshDesc.m_materialName = "Submesh Name";
submeshDesc.m_vertexBuffers = &vertexBufferDesc;
submeshDesc.m_numVertexBuffers = 1;
submeshDesc.m_primitive = nvidia::apex::RenderMeshAssetAuthoring::Primitive::TRIANGLE_LIST;
submeshDesc.m_indexType = nvidia::apex::RenderMeshAssetAuthoring::IndexType::UINT;
submeshDesc.m_vertexIndices = &mIndices[0];
submeshDesc.m_numIndices = mIndices.size();
submeshDesc.m_firstVertex = 0;
// we don't use parts for clothing meshes
submeshDesc.m_partIndices = NULL;
submeshDesc.m_numParts = 0;
// set the culling mode
submeshDesc.m_cullMode = nvidia::apex::RenderCullMode::CLOCKWISE;
A vertex buffer stores all vertex related data for that particular submesh:
// add position
vertexBufferDesc.setSemanticData( nvidia::apex::RenderVertexSemantic::POSITION, // the semantic
&mVertices[0], // the raw data pointer
sizeof(physx::PxVec3), // the raw data stride
nvidia::apex::RenderDataFormat::FLOAT3); // the raw data format
// [...] similar for normals/tangents/bitangents
// add texcoords
vertexBufferDesc.setSemanticData( nvidia::apex::RenderVertexSemantic::TEXCOORD0,
&mTexCoords[0],
sizeof(nvidia::apex::VertexUV),
nvidia::apex::RenderDataFormat::FLOAT2);
// add bones
vertexBufferDesc.setSemanticData( nvidia::apex::RenderVertexSemantic::BONE_INDEX,
&mBoneIndices[0],
sizeof(PxU16) * 4,
nvidia::apex::RenderDataFormat::USHORT4);
vertexBufferDesc.setSemanticData( nvidia::apex::RenderVertexSemantic::BONE_WEIGHT,
&mBoneWeights[0],
sizeof(physx::PxF32) * 4,
nvidia::apex::RenderDataFormat::FLOAT4);
Add custom buffers to add painting information.
Here the buffers MAX_DISTANCE, COLLISION_SPHERE_DISTANCE, COLLISION_SPHERE_RADIUS and USED_FOR_PHYSICS are added. It is important that the strings that define the custom buffer match exactly these names:
nvidia::apex::RenderSemanticData customBufferSemanticData[4];
// this is for max distance
customBufferSemanticData[0].data = &mMaxDistance[0];
customBufferSemanticData[0].stride = sizeof(float);
customBufferSemanticData[0].format = nvidia::apex::RenderDataFormat::FLOAT1;
customBufferSemanticData[0].ident = "MAX_DISTANCE";
// these two are for backstop
customBufferSemanticData[1].data = &mCollisionSphereDistance[0];
customBufferSemanticData[1].stride = sizeof(float);
customBufferSemanticData[1].format = nvidia::apex::RenderDataFormat::FLOAT1;
customBufferSemanticData[1].ident = "COLLISION_SPHERE_DISTANCE";
customBufferSemanticData[2].data = &mCollisionSphereRadius[0];
customBufferSemanticData[2].stride = sizeof(float);
customBufferSemanticData[2].format = nvidia::apex::RenderDataFormat::FLOAT1;
customBufferSemanticData[2].ident = "COLLISION_SPHERE_RADIUS";
// this one is also known as latch-to-nearest
customBufferSemanticData[3].data = &mUsedForPhysics[0];
customBufferSemanticData[3].stride = sizeof(unsigned char);
customBufferSemanticData[3].format = nvidia::apex::RenderDataFormat::UBYTE1;
customBufferSemanticData[3].ident = "USED_FOR_PHYSICS";
// can add multiple custom semantics to one vertex buffer
vertexBufferDesc.setCustomSemanticData(customBufferSemanticData, 4);
finally, create the render mesh asset authoring:
renderMeshAsset = static_cast<nvidia::apex::RenderMeshAssetAuthoring*>(_mApexSDK->createAssetAuthoring(RENDER_MESH_AUTHORING_TYPE_NAME));
// and apply the descriptor
renderMeshAsset->createRenderMesh(meshDesc, true);
The last parameter in createRenderMesh() creates another custom buffer that contains all the original indices. This allows the application to track where the vertices have been re-shuffled.
Physics Mesh
Now everything is ready for the essential part of the clothing authoring pipeline. A physics mesh has to be provided that is simulated at run time. This simulation mesh can be derived from the graphics data in different approaches or a custom mesh can be provided.
Singlelayer Cloth
With the singlelayer approach the graphics mesh is directly copied and eventually adapted to suit the purpose of cloth simulation:
mApexPhysicalMesh = mModuleClothing->createSingleLayeredMesh(
mApexRenderMeshAssetAuthoring, // the RenderMeshAssetAuthoring
mSubdivision, // the amount of subdivision
mWeldVertices, // weld vertices together
mCloseHoles, // close holes in the physical mesh
&progress // Progress listener
);
The createSingleLayeredMesh call returns the pointer to an ClothingPhysicalMesh object. The parameters define if subdivision, vertex merging and hole-closing is supposed to be applied. Also the on/off channel on the graphics mesh (it is stored in the RenderMeshAssetAuthoring object) is considered to choose a subset of the graphics mesh.
The physics mesh provides a simplification algorithm to reduce the number of mesh vertices and triangles:
mApexPhysicalMesh->simplify(subdivSize, maxSteps, -1, &progress);
There is a special case called immediate clothing approach which uses the same mesh for physics as well as for graphics. This requires that the mSubdivision parameter (in createSingleLayeredMesh) is set to 0 and no simplification was used. This has the advantage that mesh-mesh skinning is not necessary.
Multilayer Clothing Cloth
The multilayer approach first creates an intermediate isosurface from the graphics mesh:
mApexIsoMesh = mModuleClothing->createMultiLayeredMesh(
mApexRenderMeshAssetAuthorings, // the RenderMeshAssetAuthoring
mSubdivision, // the amount of subdivision
mRemoveInternalMeshes, // Only keep the largest isomesh
&progress // Progress listener
);
The iso-mesh provides a simplify method. It is highly recommended to simplify the very dense iso meshes. It will improve the quality and speed of the subsequent algorithmic steps:
mApexIsoMesh->simplify(mIsoSimplificationSubdiv, SIMPLIFICATOR_MAX_STEPS, -1, &progress);
Softbody
With the softbody approach a tetrahedral mesh is generated from the iso-mesh:
mApexPhysicalMesh = mApexIsoMesh->generateSoftbodyMesh(mInternalsSubdiv, &progress);
Cloth
The multilayer clothing approach with cloth simulation uses the intermediate iso-surface to derive a triangle mesh from the graphics mesh. The iso-surface is contracted to transform the volumetric surface to a flat triangle mesh:
PxReal volume = mApexIsoMesh->contract(
mIsoContractionSteps, // contraction iterations
0.01f, // abortion ratio
true, // edge expansion after each iteration
&progress // progress listener
);
The physics cloth mesh is then generated from the contracted iso-surface:
mApexPhysicalMesh = mApexIsoMesh->generateClothMesh(
20, // remove bubbles up to this size
&progress // progress listener
);
When doing so you can end up with a mesh that has bubbles, small pieces where the mesh has two layers, which is bad for the cloth simulation. Such bubbles can be detected and will be removed if its number of faces is smaller or equal to the number provided in the function call.
After that the physical mesh can be simplified again:
mApexPhysicalMesh->simplify(subdivSize, maxSteps, -1, &progress);
Custom Physics Mesh
The ClothingTool does not implement the creation of a custom physics mesh. However the Clothing Module provides means to do it, and it is possible using the Maya plug-in.
There is an interface in the ModuleClothing class to create an empty ClothingPhysicalMesh:
mApexPhysicalMesh = mModuleClothing->createEmptyPhysicalMesh();
Then the cloth or softbody mesh can be created by providing a vertex and an index buffer to that physical mesh:
mApexPhysicalMesh->setGeometry(
isTetraMesh,
numVertices,
vertexByteStride,
vertices,
numIndices,
indexByteStride,
indices
);
Creating the Clothing Asset Authoring Object
The ClothingAsset is the container that combines graphical and physical meshes as well as additional information together. The -Authoring version of this class is needed to actually carry out the combination:
// Any unique name is ok
mApexClothingAssetAuthoring= mModuleClothing->createAssetAuthoring(CLOTHING_AUTHORING_TYPE_NAME, "The authoring asset");
Binding the Graphical and the Physical Mesh
Having created a graphical mesh and physical mesh, they can now be given to the clothing asset authoring object:
mApexClothingAssetAuthoring->setMeshes(
lod, // the graphical lod number of the graphical/physical mesh pair
mApexRenderMeshAssetAuthoring, // the RenderMeshAssetAuthoring
mApexPhysicalMesh, // the ClothingPhysicalMesh
numPhysicalLods, // size of the array of max distances
physicalLodValues, // an array of max distances to chop up the physical mesh
&progress // progress listener
);
At that point the mapping between the physics and the graphics mesh is created. Also the painting channels are interpolated from the graphical mesh onto the physical mesh.
The meshes are provided together with an LoD value. At run time the game engine can ask the asset to be rendered and simulated with the specified LoD.
In addition to that there is a physical LoD. Optionally a list of values can be provided that specify how much the Max Distances are reduced for different physical LoDs. This specifies which triangles are simulated based on the Max Distance painting of the asset.
Adding Information about Bones
The asset also needs some information about the bones that are used to modify this particular asset. This includes a name, the bind pose and a parentIndex.
mApexClothingAssetAuthoring->setBoneInfo(boneIndex, boneName, bonePose, boneParent);
Additionally, a collision representation can be added to each bone as well.
Note
All the information has to be already in the bone pose space!
// clear all bone collision
mApexClothingAssetAuthoring->clearAllBoneActors();
// a bone can only have either convex collision or capsule collision
mApexClothingAssetAuthoring->addBoneConvex(boneIndex, vertices, numVertices);
// a capsule can have a transform relative to the bone pose
mApexClothingAssetAuthoring->addBoneCapsule(boneIndex, capsuleRadius, capsuleHeight, localPose);
Adding Misc Parameters
Some of the parameters for the Cloth and Softbody that are not already in the ClothingMaterial (such as thickness, self collision thickness, self collision flag, untangling flag) are given to the asset. There is a collection of methods called ClothingAssetAuthoring::setSimulation*(). These values will be constant for the asset and all its actors.
Scaling at Export
To export a parameterized object with scale, a copy of the ClothingAssetAuthoring has to be made and then scaled before serialization:
void serializeWithScale(float scale)
{
NvParameterized::Interface* copyFrom = mClothingAssetAuthoring->getNvParameterized();
NvParameterized::Interface* copyTo = mApexSdk->getParameterizedTraits()->createNvParameterized(copyFrom->className());
PX_ASSERT(copyFrom && copyTo);
copyTo->copy(copyFrom);
nvidia::apex::ClothingAssetAuthoring* tempObject = static_cast<nvidia::apex::ClothingAssetAuthoring*>(mApexSdk->createAssetAuthoring(copyTo, "tempObject"));
physx::PxMat44 id = physx::PxMat44::getIdentity();
tempObject->applyTransformation(id, scale, true, true);
serialize(tempObject->getNvParameterized());
tempObject->release();
}
Saving & Loading the Asset
The clothing asset authoring object is now completely set up and ready to be serialized. There are two ways of serializing an asset. The first
The parameterized way
Every Asset implements the getNvParameterized() method. This will return an object with full reflection. It’s up to the game engine how to serialize this to memory or disc. Sample implementations are provided using the NvParameterized::Serializer class:
bool saveParameterized(const char* filename, ClothingAsset* asset)
{
NvParameterized::Interface* paramObject = asset->getNvParameterized();
PX_ASSERT(paramObject != NULL);
NvParameterized::Serializer::SerializeType serializerType = NvParameterized::Serializer::NST_LAST;
const char* ext = getExtension(filename);
if (!strcmp(ext, "apx"))
serializerType = NvParameterized::Serializer::NST_XML;
else if (!strcmp(ext, "apb"))
serializerType = NvParameterized::Serializer::NST_BINARY;
PX_ASSERT(serializerType != NvParameterized::Serializer::NST_LAST)
physx::PxFileBuf* fileBuffer = mApexSDK->createStream(filename, physx::PxFileBuf::OPEN_WRITE_ONLY);
if (fileBuffer != NULL)
{
if (fileBuffer->isOpen())
{
NvParameterized::Serializer* serializer = mApexSDK->createSerializer(serType);
NvParameterized::Serializer::ErrorType serError = NvParameterized::Serializer::ERROR_NONE;
serError = serializer->serialize(*fileBuffer, paramObject, 1);
PX_ASSERT(serError == NvParameterized::Serializer::ERROR_NONE);
}
fileBuffer->release();
fileBuffer = NULL;
}
}
Vice versa, the game engine has to load the parameterized object prior to create a clothing asset. This is the same code as for creating run time assets. The only difference is to create an authoring asset instead:
nvidia::apex::AssetAuthoring* loadParameterized(const char* fullpath)
{
nvidia::apex::AssetAuthoring* result = NULL;
NvParameterized::Serializer::DeserializedData deserializedData;
// A FileBuffer needs to be created.
// This can also be a customized subclass of physx::PxFileBuf
physx::PxFileBuf* fileBuf = mApexSDK->createStream(fullpath, physx::PxFileBuf::OPEN_READ_ONLY);
if (fileBuf != NULL)
{
if (fileBuf->isOpen())
{
char peekData[32];
stream->peek(peekData, 32);
// The returns either Serializer::NST_BINARY or Serializer::NST_XML
NvParameterized::Serializer::SerializeType serType = mApexSDK->getSerializeType(peekData, 32);
NvParameterized::Serializer* serializer = mApexSDK->createSerializer(serType);
NvParameterized::Serializer::ErrorType serError = NvParameterized::Serializer::ERROR_NONE;
serError = serializer->deserialize(*fileBuf, deserializedData);
// do some error checking here
if (serError != NvParameterized::Serializer::ERROR_NONE)
processError(serError);
serializer->release();
}
fileBuf->release();
}
// Now deserializedData contains one or more NvParameterized objects.
for (unsigned int i = 0; i < deserializedData.size(); i++)
{
NvParameterized::Interface* data = deserializedData[i];
printf("Creating Asset of type %s\n", data->className());
if (result == NULL)
{
result = mApexSDK->createAssetAuthoring(data, "some unique name");
}
else
{
// we have to handle files with multiple assets differently, for now, let's get rid of it
deserializedData[i]->destroy();
}
}
return result;
}
Progress Listener
A lot of the functions in the authoring pipeline take some processing time. They provide a way to show a progress bar during the calculation. The nvidia::apex::IProgressListener interface can be implemented to get callbacks that report the current processing status.
It is perfectly valid to pass NULL for the progress listener:
MyProgressListener progress;
mApexClothingAssetAuthoring->setMeshes( /* all the params */ , &progress);