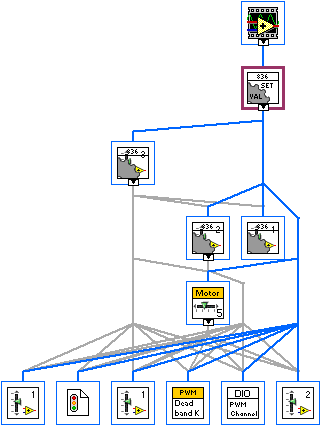
Wheel.lvlib:Wheel_Set_Value.vi
From Wheel.lvlib:Wheel_Set_Value
Wheel.lvlib:Wheel_Set_Value.vi
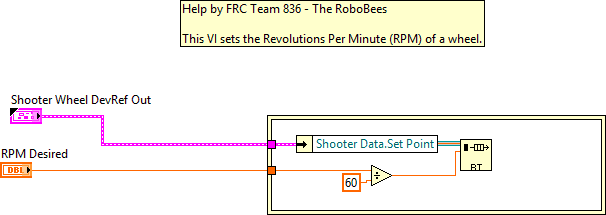
Help by FRC Team 836 - The RoboBees
This VI sets the Revolutions Per Minute (RPM) of a wheel.
![]()
|
|
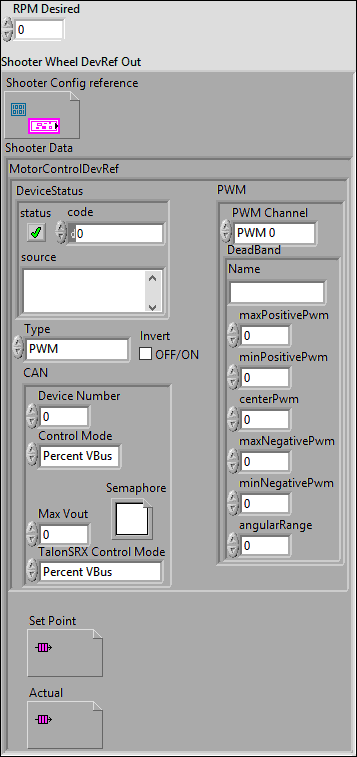
Shooter Wheel DevRef Out |
|
|
Shooter Config reference |
|
|
Shooter Data |
|
|
MotorControlDevRef |
|
|
DeviceStatus |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred.
Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code.
Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning.
Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
Type |
|
|
PWM |
|
|
PWM Channel |
|
|
DeadBand |
|
|
Name |
|
|
maxPositivePwm |
|
|
minPositivePwm |
|
|
centerPwm |
|
|
maxNegativePwm |
|
|
minNegativePwm |
|
|
angularRange |
|
|
CAN |
|
|
Device Number |
|
|
Control Mode |
|
|
Semaphore semaphore is a reference to an existing or newly created semaphore. |
|
|
Max Vout |
|
|
TalonSRX Control Mode Control Mode specifies how the Talon SRX will control the motor. Percent VBus is the standard open-loop mode that is also accessible via the PWM interface on the Talon SRX. |
|
|
Invert |
|
|
Set Point |
|
|
Actual |
|
|
RPM Desired |
|
|
WPI_MotorControlType.ctl C:\Program Files (x86)\National Instruments\LabVIEW 2015\vi.lib\Rock Robotics\WPI\MotorControl\WPI_MotorControlType.ctl |
|
|
Wheel.lvlib:Data.ctl C:\Program Files (x86)\National Instruments\LabVIEW 2015\user.lib\836-Library\Motion Control\Shooter_Wheel\Data.ctl |
|
|
WPI_CANTalonSRX_APIControlMode.ctl C:\Program Files (x86)\National Instruments\LabVIEW 2015\vi.lib\Rock Robotics\WPI\CAN\TalonSRX\WPI_CANTalonSRX_APIControlMode.ctl |
|
|
WPI_CANJaguar_ControlMode.ctl C:\Program Files (x86)\National Instruments\LabVIEW 2015\vi.lib\Rock Robotics\WPI\CAN\Jaguar\SubVIs\WPI_CANJaguar_ControlMode.ctl |
|
|
WPI_MotorControlDeviceRef.ctl C:\Program Files (x86)\National Instruments\LabVIEW 2015\vi.lib\Rock Robotics\WPI\MotorControl\WPI_MotorControlDeviceRef.ctl |
|
|
Semaphore RefNum C:\Program Files (x86)\National Instruments\LabVIEW 2015\vi.lib\Utility\semaphor.llb\Semaphore RefNum |
|
|
WPI_PWMDeadband.ctl C:\Program Files (x86)\National Instruments\LabVIEW 2015\vi.lib\Rock Robotics\WPI\PWM\WPI_PWMDeadband.ctl |
|
|
Wheel.lvlib:WheelControl.ctl C:\Program Files (x86)\National Instruments\LabVIEW 2015\user.lib\836-Library\Motion Control\Shooter_Wheel\WheelControl.ctl |
|
|
FPGA_DIOPWMChannel.ctl C:\Program Files (x86)\National Instruments\LabVIEW 2015\vi.lib\Rock Robotics\SystemInterfaces\DIO\FPGA_DIOPWMChannel.ctl |
|
|
Wheel.lvlib:Config.ctl C:\Program Files (x86)\National Instruments\LabVIEW 2015\user.lib\836-Library\Motion Control\Shooter_Wheel\Config.ctl |
"Wheel.lvlib:Wheel_Set_Value.vi History"
Current Revision: 14
Position in Hierarchy