Soft_Stops.vi
From VI Soft_Stops
Soft_Stops.vi
Help by FRC Team 836 - The RoboBees
VI DESCRIPTION:
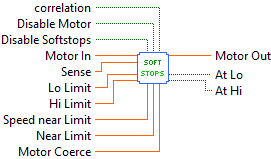
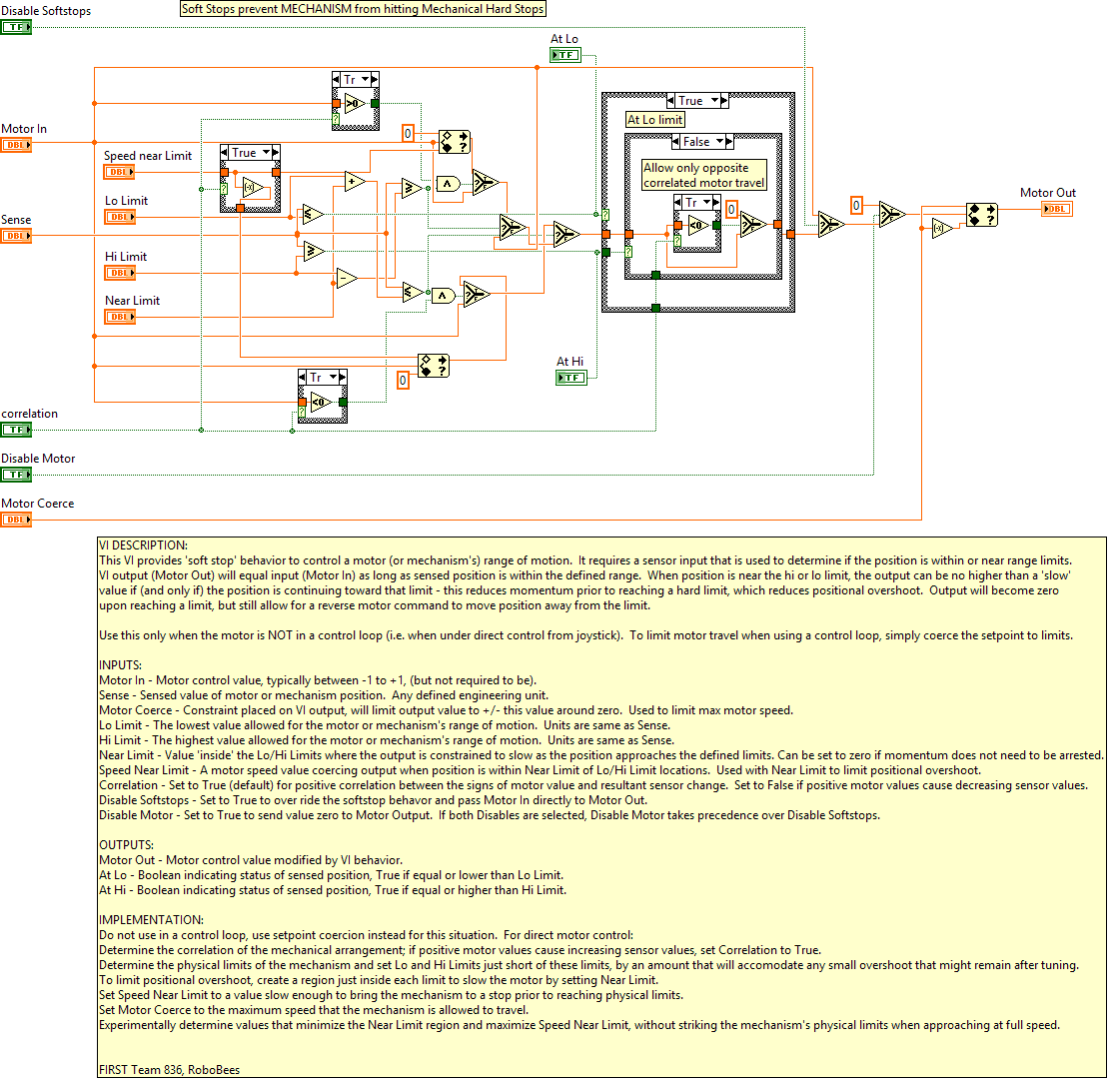
This VI provides 'soft stop' behavior to control a motor (or mechanism's) range of motion. It requires a sensor input that is used to determine if the position is within or near range limits.
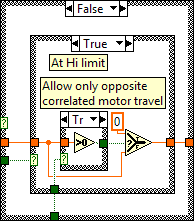
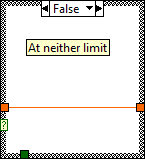
VI output (Motor Out) will equal input (Motor In) as long as sensed position is within the defined range. When position is near the hi or lo limit, the output can be no higher than a 'slow'
value if (and only if) the position is continuing toward that limit - this reduces momentum prior to reaching a hard limit, which reduces positional overshoot. Output will become zero
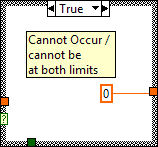
upon reaching a limit, but still allow for a reverse motor command to move position away from the limit.
Use this only when the motor is NOT in a control loop (i.e. when under direct control from joystick). To limit motor travel when using a control loop, simply coerce the setpoint to limits.
|
|
Speed near Limit |
|
|
Near Limit |
|
|
Lo Limit |
|
|
Hi Limit |
|
|
Sense |
|
|
Motor In |
|
|
Disable Motor |
|
|
Motor Coerce |
|
|
Disable Softstops |
|
|
correlation |
|
|
At Lo |
|
|
At Hi |
|
|
Motor Out |
![]()
![]()
![]()


"Soft_Stops.vi History"
Current Revision: 19
Position in Hierarchy