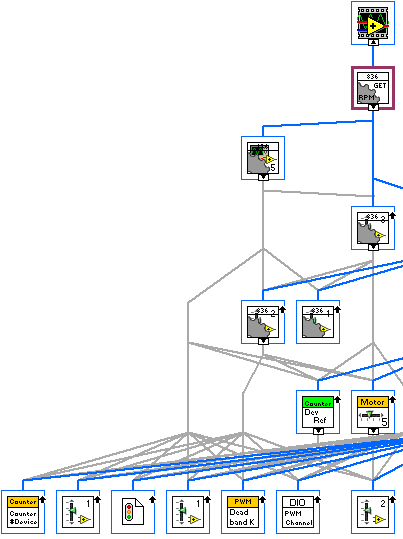
Shooter _Wheel.lvlib:Shooter_Wheel_Get.vi
From Shooter Wheel lvlib
Shooter _Wheel.lvlib:Shooter_Wheel_Get.vi
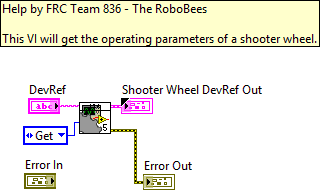
Help by FRC Team 836 - The RoboBees
This VI will get the operating parameters of a shooter wheel.
![]()
|
|
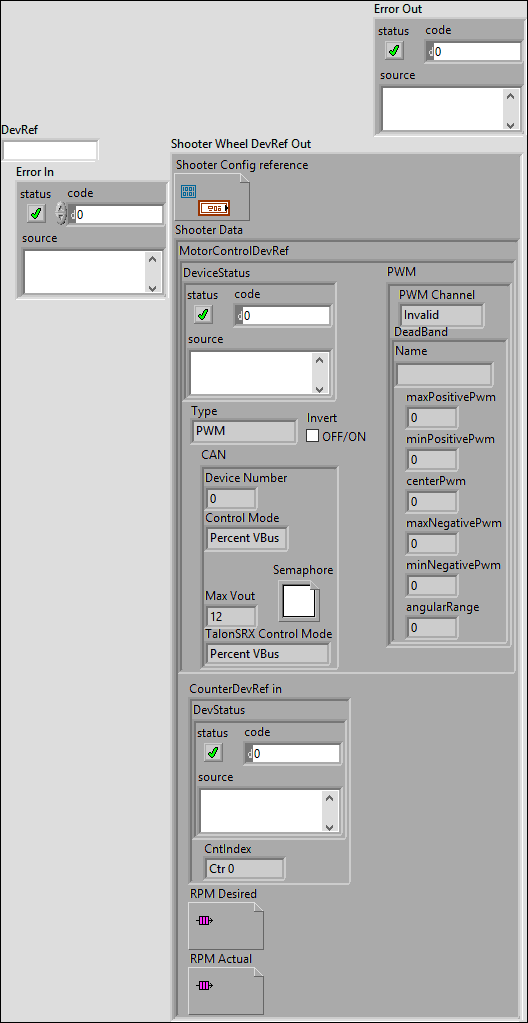
DevRef |
|
|
Error In error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs.
Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred.
Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code.
Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning.
Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
Error Out error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs.
Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred.
Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code.
Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning.
Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
Shooter Wheel DevRef Out |
|
|
Shooter Config reference |
|
|
Shooter Data |
|
|
MotorControlDevRef |
|
|
DeviceStatus |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred.
Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code.
Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning.
Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
Type |
|
|
PWM |
|
|
PWM Channel |
|
|
DeadBand |
|
|
Name |
|
|
maxPositivePwm |
|
|
minPositivePwm |
|
|
centerPwm |
|
|
maxNegativePwm |
|
|
minNegativePwm |
|
|
angularRange |
|
|
CAN |
|
|
Device Number |
|
|
Control Mode |
|
|
Semaphore semaphore is a reference to an existing or newly created semaphore. |
|
|
Max Vout |
|
|
TalonSRX Control Mode Control Mode specifies how the Talon SRX will control the motor. Percent VBus is the standard open-loop mode that is also accessible via the PWM interface on the Talon SRX. |
|
|
Invert |
|
|
CounterDevRef in |
|
|
DevStatus error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs.
Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred.
Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code.
Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning.
Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
CntIndex |
|
|
RPM Desired |
|
|
RPM Actual |
|
|
Shooter Wheel.lvlib:ShooterConfig.ctl C:\Program Files (x86)\National Instruments\LabVIEW 2015\user.lib\836-Library\Motion Control\Shooter_Wheel\ShooterConfig.ctl |
|
|
Shooter _Wheel.lvlib:Shooter_Wheel_GetSet.vi C:\Program Files (x86)\National Instruments\LabVIEW 2015\user.lib\836-Library\Motion Control\Shooter_Wheel\Shooter_Wheel_GetSet.vi |
|
|
FPGA_CounterCtrSystemIndex.ctl C:\Program Files (x86)\National Instruments\LabVIEW 2015\vi.lib\Rock Robotics\SystemInterfaces\Counter\FPGA_CounterCtrSystemIndex.ctl |
|
|
WPI_PWMDeadband.ctl C:\Program Files (x86)\National Instruments\LabVIEW 2015\vi.lib\Rock Robotics\WPI\PWM\WPI_PWMDeadband.ctl |
|
|
Shooter Wheel.lvlib:ShooterControl.ctl C:\Program Files (x86)\National Instruments\LabVIEW 2015\user.lib\836-Library\Motion Control\Shooter_Wheel\ShooterControl.ctl |
|
|
WPI_MotorControlDeviceRef.ctl C:\Program Files (x86)\National Instruments\LabVIEW 2015\vi.lib\Rock Robotics\WPI\MotorControl\WPI_MotorControlDeviceRef.ctl |
|
|
Shooter Wheel.lvlib:ShooterData.ctl C:\Program Files (x86)\National Instruments\LabVIEW 2015\user.lib\836-Library\Motion Control\Shooter_Wheel\ShooterData.ctl |
|
|
FPGA_DIOPWMChannel.ctl C:\Program Files (x86)\National Instruments\LabVIEW 2015\vi.lib\Rock Robotics\SystemInterfaces\DIO\FPGA_DIOPWMChannel.ctl |
|
|
WPI_CANJaguar_ControlMode.ctl C:\Program Files (x86)\National Instruments\LabVIEW 2015\vi.lib\Rock Robotics\WPI\CAN\Jaguar\SubVIs\WPI_CANJaguar_ControlMode.ctl |
|
|
WPI_MotorControlType.ctl C:\Program Files (x86)\National Instruments\LabVIEW 2015\vi.lib\Rock Robotics\WPI\MotorControl\WPI_MotorControlType.ctl |
|
|
Semaphore RefNum C:\Program Files (x86)\National Instruments\LabVIEW 2015\vi.lib\Utility\semaphor.llb\Semaphore RefNum |
|
|
WPI_CANTalonSRX_APIControlMode.ctl C:\Program Files (x86)\National Instruments\LabVIEW 2015\vi.lib\Rock Robotics\WPI\CAN\TalonSRX\WPI_CANTalonSRX_APIControlMode.ctl |
|
|
WPI_CounterDevRef.ctl C:\Program Files (x86)\National Instruments\LabVIEW 2015\vi.lib\Rock Robotics\WPI\Counter\WPI_CounterDevRef.ctl |
"Shooter _Wheel.lvlib:Shooter_Wheel_Get.vi History"
Current Revision: 46
Position in Hierarchy