Velocity_Profile.vi
From LabView Motion Control Velocity Profile
Velocity_Profile.vi
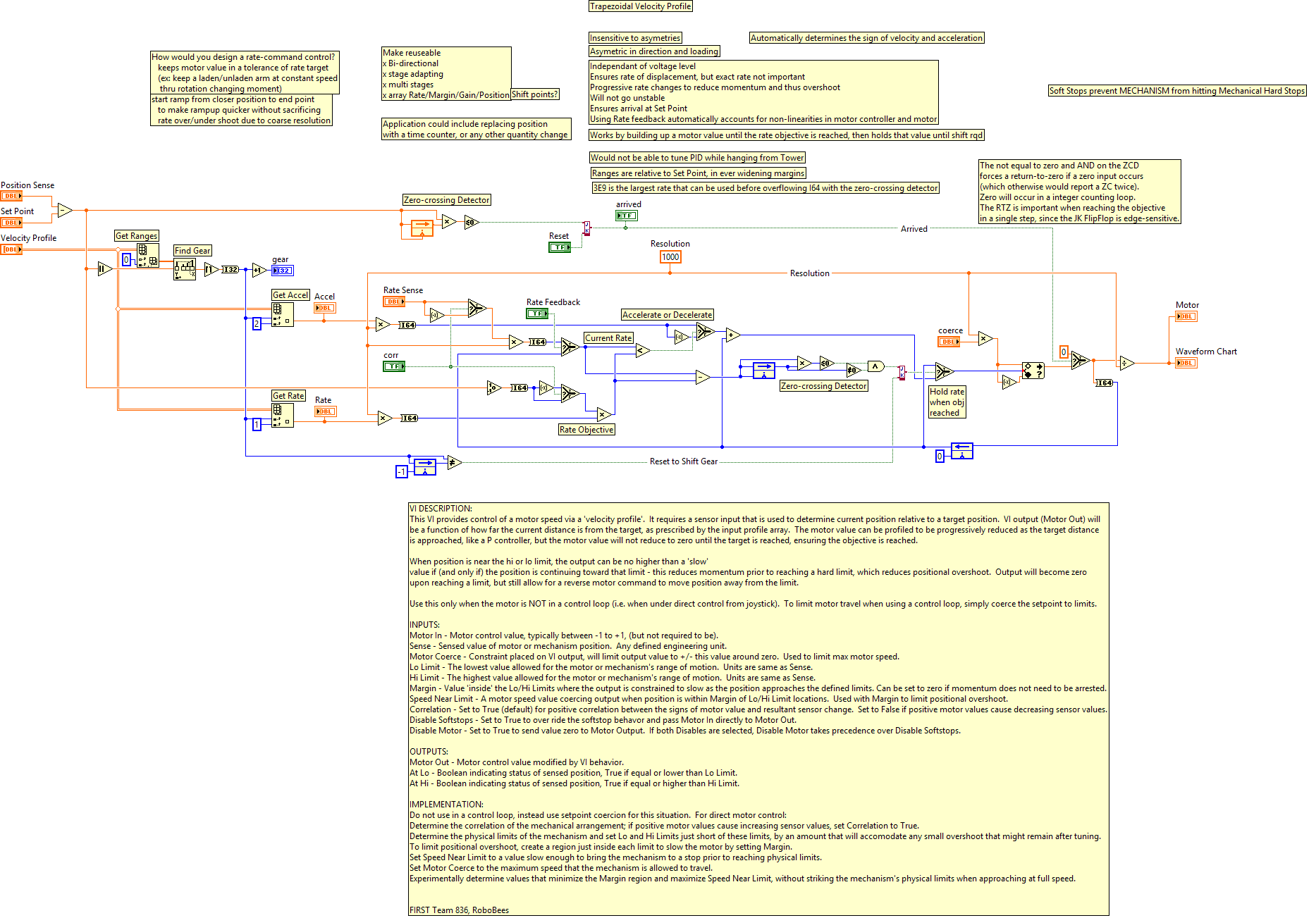
VI DESCRIPTION:
This VI provides control of a motor speed via a 'velocity profile'. It requires a sensor input that is used to determine current position relative to a target position. VI output (Motor Out) will
be a function of how far the current distance is from the target, as prescribed by the input profile array.
The motor value can be profiled to be progressively reduced as the target distance
is approached, like a P controller, but the motor value will not reduce to zero until the target is reached, ensuring the objective is reached.
When position is near the hi or lo limit, the output can be no higher than a 'slow'
value if (and only if) the position is continuing toward that limit - this reduces momentum prior to reaching a hard limit, which reduces positional overshoot. Output will become zero
upon reaching a limit, but still allow for a reverse motor command to move position away from the limit.
Use this only when the motor is NOT in a control loop (i.e. when under direct control from joystick). To limit motor travel when using a control loop, simply coerce the setpoint to limits.
|
|
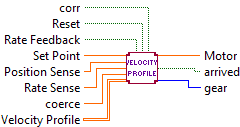
Position Sense |
|
|
Rate Sense |
|
|
Set Point |
|
|
Reset |
|
|
Velocity Profile |
|
|
|
|
Rate Feedback |
|
|
corr |
|
|
coerce |
|
|
Motor |
|
|
arrived |
|
|
Waveform Chart |
|
|
gear |
|
|
Rate |
|
|
Accel |
|
|
JK Latch.vi C:\Program Files (x86)\National Instruments\LabVIEW 2015\user.lib\836-Library\Logic\JK Latch.vi |
"Velocity_Profile.vi History"
Current Revision: 117
Position in Hierarchy